Allegro Hand™
Allegro Hand는 독립적인 전류제어 관절을 갖춘 로봇핸드 제품으로,
로봇 기능 연구개발과 휴머노이드 로봇을 위한 완벽한 플랫폼을 제공합니다.
로봇 기능 연구개발과 휴머노이드 로봇을 위한 완벽한 플랫폼을 제공합니다.

고성능 액추에이터 제어 기술 및 제어 시스템에 대한
자체설계 기술력(HW/SW) 보유
자체설계 기술력(HW/SW) 보유
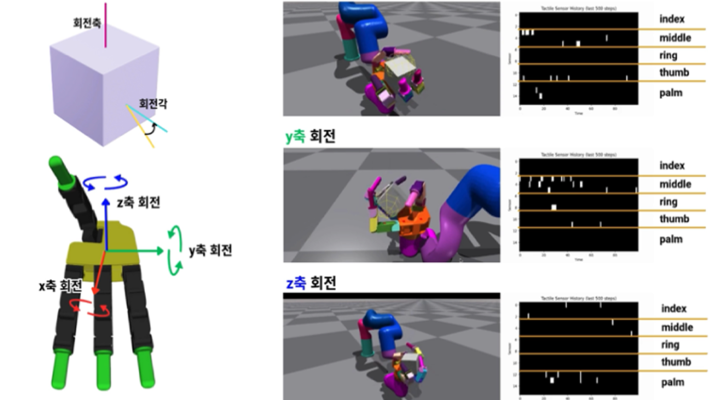
다자유도 제어 기술 기반 실시간 동기화 및 고성능 시뮬레이션을 통한
높은 수준의 Dexterity 구현
높은 수준의 Dexterity 구현

180곳 이상의 연구 파트너들이
Allegro Hand를 활용한
다수의 논문 발표 및 연구 · 개발 진행
Allegro Hand를 활용한
다수의 논문 발표 및 연구 · 개발 진행



