빈피킹
도입목적
빈피킹은 사람이 육안 식별과 수작업으로 처리하던 복잡한 피킹 공정을 자동화하여 근로자의 안전을 확보하고 생산성을 극대화하는 데 목적이
있습니다. 고중량 · 위험 물품도 자동으로 처리할 수 있으며, 다품종 소량 생산 환경에서도 유연하게 대응할 수 있습니다.
기대효과

- 비정형 부품 자동 픽업
- 3D 비전으로 비정형 부품을 정확히 픽업 수행

- 공급 속도 향상
- 수작업 대비 빠른 피킹으로 후공정 대기 시간 단축

- 인력 비용 절감
- 반복 피킹을 로봇이 대신해 인력 투입을 최소화

- 정밀 그리핑
- 비정형 부품도 손상 없이 안정적으로 취출 구현
주요 활용 분야
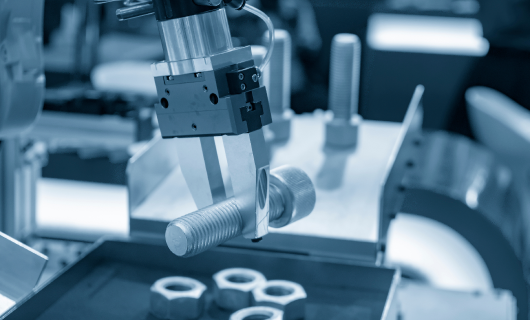
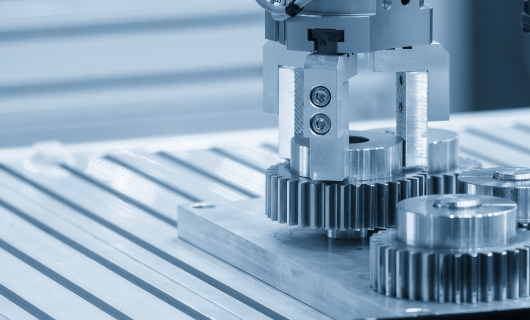
- 자동차 부품 제조
- 기어 · 베어링 · 볼트 등 랜덤 적재 부품의 자동 피킹 공정
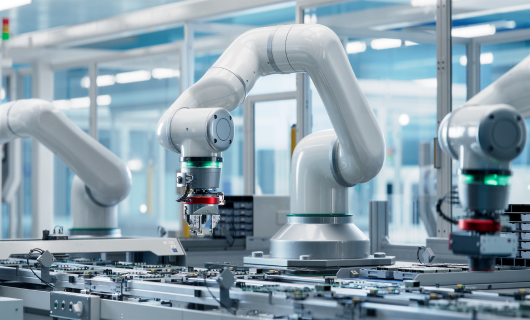
- 전자제품 조립 라인
- 커넥터 · PCB 등 소형 부품의 자동 공급 공정
- 주조 · 단조 공정
- 고온 · 중량 부품의 자동 피킹 및 이송 공정

- 물류창고 자동화
- 무작위 위치의 패키지를 자동 분류하는 물류 공정
Reference

- 박스 피킹
- 무작위로 놓인 다양한 크기의 박스를 선반에 정리할 수 있는 솔루션 요구에 대응하여 3D 비전과 AI 인식 기술을 적용해 박스의 위치와 방향을 파악하고 로봇 핸드를 통해 안정적인 Pick & Place 구현.
다양한 박스를 정확하고 안정적으로 취급하여 선반 적재 공정의 자동화와 작업 효율 향상.